松岡技研のAMR
従来のAGVは、事前に床や壁に誘導体を設置するなど、環境を十分に整える必要がありました。
その為、製造工程のレイアウト変更や、工程追加の度に工事が必要になるといった課題もありましたが、
弊社のAMRは誘導体を設置する必要はございません。
スマートフォンにてAMRを操作し、自己位置推定しながら走行する自立走行型AMRをご提供いたします。

松岡技研の
AMRの特徴






お客様のご要望をお聞きして
オーダーメイド製作
松岡技研のAMRは周囲環境に合わせて自律走行が可能なため、今までAGVが導入することができなかった新しい場所への導入が可能となります。また、お客様の非生産的な仕事を人の手から減らすため、ご要望をお聞きして最適なAMRをオーダーメイドで設計致します。
さらに、搭載する移載機や集中管理、交差点管理など制御システムについても自社にて設計、製作しているため、ワンストップにてお客様の自動化を徹底サポート致します。
※オリジナル移載機、制御システムの設計・製作についてはお問い合わせください。
自己位置推定の安定性
世界No.1
工場内では人やフォークリフトが絶え間なく通行し、資材や機材の移動など、刻々と環境が変化します。弊社のAMRは工場の壁面などの測距情報を元に自己位置を推定しており、またその壁面が20%しか見えていなくても自己位置を推定することが可能なため、世界トップクラスの走行安定性能を有しております。
停止精度±10mm、停止角度±1°
設置条件に制約なし
・停止精度が高いため、ロボット搭載が可能です。
・1台のAMRで複数個所の作業が実現できます。
・既存設備の変更が不要です。
・障害物回避・有人環境運用が可能です
※前提としてAMRが走行可能な床面である事
お客様の用途に沿った最適なAMRをご提供いたします
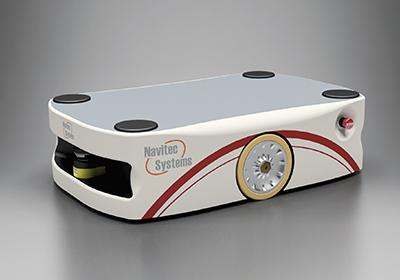
差動二輪タイプ
お客様の設備に合った、移載機搭載が可能です。
メカナムホイールタイプ
お客様の設備に合った、移載機搭載が可能です。
360度自在に走行可能なモデルです。

フォークタイプ
平置きのパレットから、高さの異なる物への移載が可能です。(搬送コンベヤ、固定ラック等)

外形寸法 L*W*H:824*533*253mm
自重:130kg
積載荷重:400kg
旋回直径:916mm
駆動方式:2輪差動駆動
誘導方式:レーザーSLAM + ビジュアル + IMU
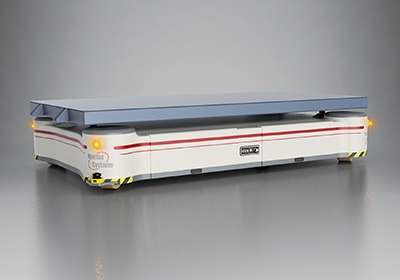
外形寸法 L*W*H:949*650*253mm
自重:180kg
積載荷重:600kg
旋回直径:1015mm
駆動方式:2輪差動駆動
誘導方式:レーザーSLAM + ビジュアル + IMU

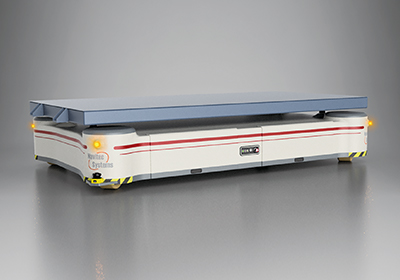
外形寸法 L*W*H:949*650*253mm
自重:190kg
積載荷重:1000kg
旋回直径:1015mm
駆動方式:2輪差動駆動
誘導方式:レーザーSLAM + ビジュアル + IMU

外形寸法 L*W*H:1174*814*263mm
自重:280kg
積載荷重:1500kg
旋回直径:1029mm
駆動方式:2輪差動駆動
誘導方式:レーザーSLAM + ビジュアル + IMU

寸法 L*W*H:2077*1200*2236mm
自重:1890kg
積載荷重:1400kg
揚高:1600mm
荷重中心距離:500mm
直角積付通路幅:2410mm
